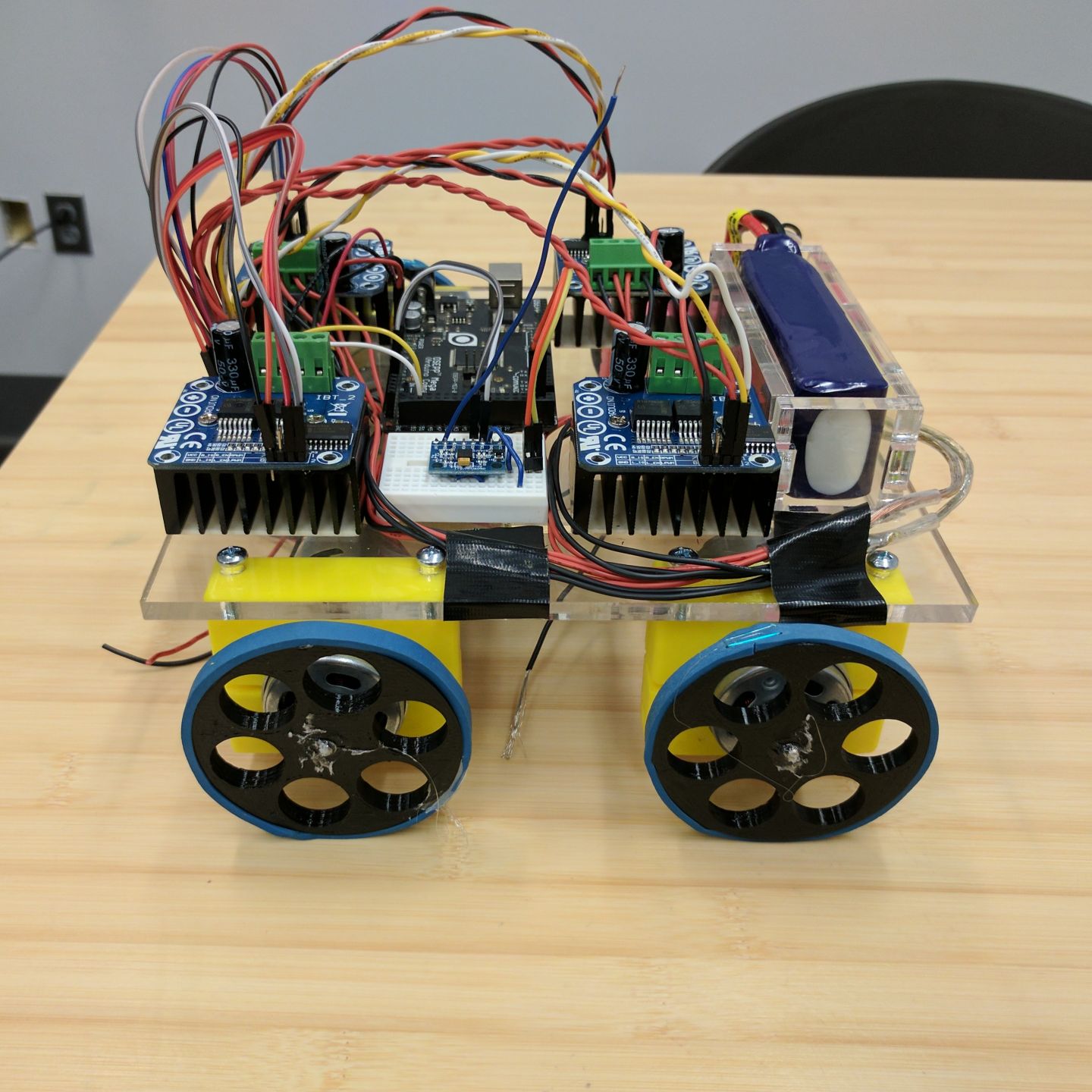
The BB8 project is the result of an open-ended assignment from the Quantitative Engineering Analysis class that I took in Fall 2016. It is a self-balancing robot built on rigorous control-system analysis and custom numerical simulation, with an efficient integrated mechanical and electrical design on top.
Results
After six weeks of work, this project was an unqualified success. We completed…
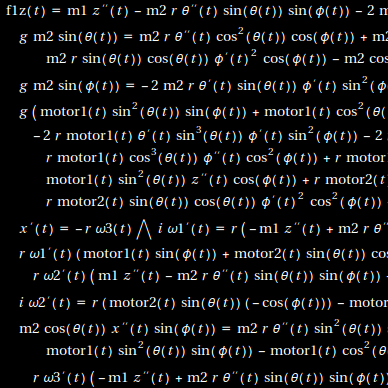
- A complete mathematical and numerical analysis of the planar system
- Stable and reliable hardware implementing that control system
- A numerical analysis of the nonlinear 3D system
We were invited to present our process and results at the Olin Expo VIP breakfast, and will soon be presenting to a group of Massachussets legislators, including the current Senate Majority Leader, Stan Rosenburg.
For more information, take a look at our paper and final website